Autoraamide diagnostika ja remont
 Käesolevas artiklis vaatleme lähemalt maanteesõidukite raamide diagnoosimise ja parandamise võimalusi, eelkõige raamide joondamise ja raamiosade vahetamise võimalusi. Kaalume ka mootorrattaraame - mõõtmete ja remonditehnika kontrollimise võimalust, samuti maanteesõidukite kandekonstruktsioonide remonti.
Käesolevas artiklis vaatleme lähemalt maanteesõidukite raamide diagnoosimise ja parandamise võimalusi, eelkõige raamide joondamise ja raamiosade vahetamise võimalusi. Kaalume ka mootorrattaraame - mõõtmete ja remonditehnika kontrollimise võimalust, samuti maanteesõidukite kandekonstruktsioonide remonti.
Peaaegu igas liiklusõnnetuses seisame seega silmitsi kehavigastustega. maanteesõidukite raamid. Kuid paljudel juhtudel tekivad sõiduki raami kahjustused ka sõiduki ebaõige kasutamise tõttu (näiteks seadme käivitamine traktori pööratava rooliteljega ja traktori raami ja poolhaagise samaaegne kinnikiilumine külgmiste ebatasasuste tõttu. maastik).
Maanteesõidukite raamid
Maanteesõidukite raamid on nende tugiosa, mille ülesanne on ühendada ja säilitada käigukasti üksikute osade ja muude sõiduki osade nõutav suhteline asend. Mõistet "maanteesõidukite raamid" leidub praegu kõige sagedamini raamiga šassiiga sõidukites, mis esindavad peamiselt veoautode, poolhaagiste ja haagiste, busside, samuti põllumajandusmasinate (kombainid, traktorid) rühma. ), samuti mõned maastikuautod. maanteetehnika (Mercedes-Benz G-klass, Toyota Land Cruiser, Land Rover Defender). Raam koosneb tavaliselt terasprofiilidest (peamiselt U- või I-kujuline ja lehe paksusega umbes 5-8 mm), mis on ühendatud keevisõmbluste või neetidega, võimalike kruvide ühendustega.
Raamide peamised ülesanded:
- veojõud ja pidurdusjõud jõuülekandele ja ülekandele üle kanda,
- kinnitage teljed,
- kandma keha ja koormust ning kandma oma kaalu teljele (võimsusfunktsioon),
- elektrijaama funktsiooni lubamine,
- tagama sõiduki meeskonna ohutuse (passiivne turvaelement).
Raami nõuded:
- jäikus, tugevus ja paindlikkus (eriti painde ja väände osas), väsimus,
- väike kaal,
- konfliktideta sõiduki osade suhtes,
- pikk kasutusiga (korrosioonikindlus).
Raamide eraldamine vastavalt nende kujundamise põhimõttele:
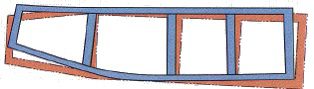
- soonikraam: koosneb kahest pikitalast, mis on ühendatud põiktaladega, pikitalasid saab kujundada nii, et teljed saaksid vedrustada,
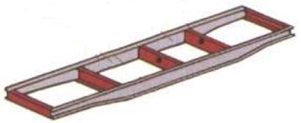
Ribiraam
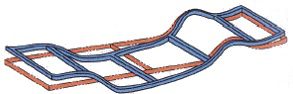
- diagonaalraam: koosneb kahest pikitalast, mis on ühendatud põiktaladega, konstruktsiooni keskel on paar diagonaali, mis suurendavad raami jäikust,
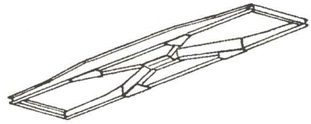
Diagonaalraam
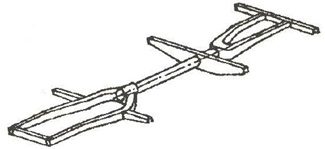
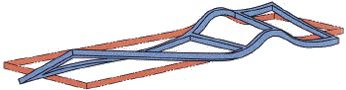
- Ristraam "X": koosneb kahest külgmisest osast, mis puudutavad teineteist keskel, risttalad ulatuvad külgmistelt osadelt külgedele,

Ristraam
- tagaraam: kasutab tugitoru ja võnkuvaid telgi (pendelteljed), leiutaja Hans Ledwinka, Tatra tehniline direktor; seda raami kasutati esmakordselt sõiduautol Tatra 11; seda iseloomustab märkimisväärne tugevus, eriti väändetugevus, seetõttu sobib see eriti hästi maastikusõiduks mõeldud sõidukitele; ei võimalda mootori ja käigukasti osade paindlikku paigaldamist, mis suurendab nende vibratsioonist põhjustatud müra,
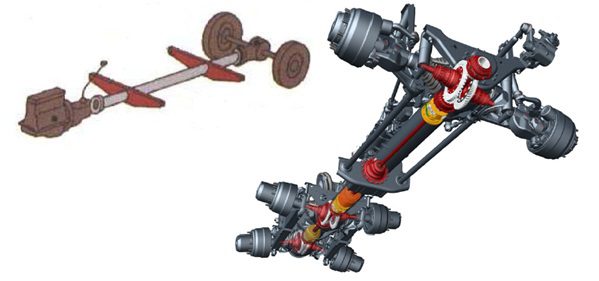
Tagumine raam
- põhiraami raam: võimaldab mootorit paindlikult paigaldada ja kõrvaldab eelmise konstruktsiooni puudused,
Tagumine raam
- platvormraam: seda tüüpi struktuur on üleminek isekandva kere ja raami vahel
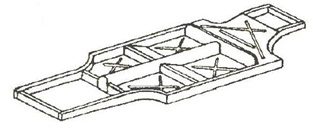
Platvormi raam
- võreraam: see on tembeldatud lehtmetallist võrestruktuur, mida leidub kaasaegsemat tüüpi bussides.
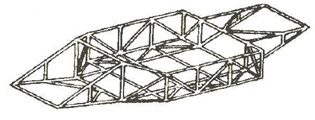
Võre raam
- siiniraamid (ruumiraam): koosneb kahest ristkülikukujulisest raamist, mis asuvad üksteise kohal ja on ühendatud vertikaalsete vaheseintega.
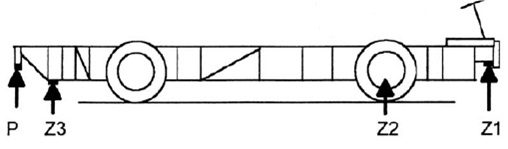
Bussi raam
Mõne arvates viitab mõiste "maanteesõiduki raam" ka sõiduauto isekandvale kereraamile, mis täidab täielikult tugiraami funktsiooni. Tavaliselt tehakse seda tembeldamise ja lehtmetallist profiilide keevitamisel. Esimesed isekandvate täisterasest kerega seeriaautod olid Citroën Traction Avant (1934) ja Opel Olympia (1935).
Peamised nõuded on raami esi- ja tagaosade ning kere kui terviku ohutu deformatsiooni tsoonid. Programmeeritud löögikindlus peaks löögienergiat võimalikult tõhusalt neelama, neelates selle enda deformatsiooni tõttu, seega viivitades sisemuse enda deformatsiooni. Vastupidi, see on võimalikult raske, et kaitsta reisijaid ja hõlbustada nende päästmist pärast liiklusõnnetust. Jäikuse nõuded hõlmavad ka külgkokkupõrke vastupidavust. Kere pikitaladel on reljeefsed sälgud või need on painutatud nii, et pärast lööki deformeeruvad õiges suunas ja õiges suunas. Isekandev kere võimaldab vähendada sõiduki kogumassi kuni 10%. Sõltuvalt praegusest majandussituatsioonist selles turusektoris tegeletakse aga pigem veoautoraamide remondiga, mille ostuhind on sõiduautode omast oluliselt kõrgem ja mida kliendid kasutavad pidevalt kaubanduslikuks otstarbeks (transport). ) tegevused. ...
Sõiduautode tõsise kahjustamise korral klassifitseerivad nende kindlustusseltsid selle totaalseks kahjuks ja seetõttu tavaliselt remondiga ei tegele. See olukord on avaldanud kriitilist mõju uute sõiduautode ekvalaiserite müügile, mis on viimastel aastatel märkimisväärselt vähenenud.
Mootorrataste raamid on tavaliselt keevitatud torukujuliste profiilide jaoks, nii et esi- ja tagakahvlid on pööratavalt paigaldatud selliselt valmistatud raamile. Tõmmake vastavalt remonti. Seda tüüpi seadmete edasimüüjad ja teeninduskeskused ei soovita mootorrattaraami osade vahetamist üldiselt tungivalt, kuna mootorratturid võivad sellega kaasneda. Nendel juhtudel on pärast raami diagnoosimist ja rikke tuvastamist soovitatav asendada kogu mootorratta raam uuega.
Veoautode, sõiduautode ja mootorrataste raamide diagnoosimiseks ja parandamiseks kasutatakse aga erinevaid süsteeme, mille ülevaade on toodud allpool.
Sõiduki raamide diagnostika
Kahju hindamine ja mõõtmine
Liiklusõnnetuste korral on raam ja kereosad vastavalt erinevat tüüpi koormustele (nt rõhk, pinge, painutamine, väändumine, tugipost). nende kombinatsioonid.
Sõltuvalt löögi tüübist võivad raamil, põrandaraamil või korpusel tekkida järgmised deformatsioonid:
- Raami keskosa kukkumine (näiteks laupkokkupõrke või auto tagaosaga kokkupõrke korral),
Raami keskosa rike
- raami üles surumine (laupkokkupõrkega),

Tõstke raam üles
- külgsuunaline nihe (külgkokkupõrge)
Külgmine nihe
- keerutamine (näiteks auto keeramine)
Keeramine
Lisaks võivad raamimaterjalil tekkida praod või praod. Kahjude täpse hindamise osas on vaja diagnoosida visuaalse kontrolli abil ja vastavalt liiklusõnnetuse raskusele on vaja ka vastavalt auto raami mõõta. tema keha.
Visuaalne kontroll
See hõlmab tekitatud kahju kindlaksmääramist, et teha kindlaks, kas sõidukit on vaja mõõta ja milliseid remonditöid teha. Sõltuvalt õnnetuse tõsidusest kontrollitakse sõidukit kahjustuste osas erinevatest vaatenurkadest:
1. Välised kahjustused.
Autot kontrollides tuleks kontrollida järgmisi tegureid:
- deformatsioonikahjustused,
- liigeste suurus (näiteks uksed, kaitserauad, kapott, pagasiruum jne), mis võivad viidata kere deformatsioonile, ja seetõttu on vaja teha mõõtmisi,
- väikesed deformatsioonid (näiteks väljaulatuvad osad suurtel aladel), mida saab ära tunda valguse erineva peegelduse järgi,
- klaasi, värvi, pragunemise, servade kahjustamine.
2. Põrandaraami kahjustus.
Kui märkate sõiduki kontrollimisel muljumist, pragunemist, keerdumist või sümmeetriat, mõõtke sõiduk.
3. Sisemised kahjustused.
- praod, pigistamine (selleks on sageli vaja vooder lahti võtta),
- turvavöö eelpinguti langetamine,
- turvapatjade avamine,
- tulekahjud,
- reostus.
3. Sekundaarne kahjustus
Sekundaarse kahjustuse diagnoosimisel on vaja kontrollida, kas raami muid, muid osi on olemas, vastavalt. kere, näiteks mootor, käigukast, teljehoidjad, rool ja muud sõiduki šassii olulised osad.
Remondi järjekorra kindlaksmääramine
Visuaalse kontrolli käigus tuvastatud kahjustused registreeritakse andmelehel ja seejärel määratakse kindlaks vajalikud parandused (nt asendamine, osade remont, osade vahetus, mõõtmine, värvimine jne). Seejärel töödeldakse teavet arvutipõhise arvutusprogrammi abil, et määrata kindlaks remondikulude ja sõiduki ajaväärtuse suhe. Seda meetodit kasutatakse aga peamiselt kergete sõidukite raamide remondis, kuna veoautoraamide parandamist on joondamise põhjal raskem hinnata.
Raami / kere diagnostika
On vaja kindlaks teha, kas kandja deformatsioon on toimunud, vastavalt. põranda raam. Mõõtmissondid, tsentreerimisseadmed (mehaanilised, optilised või elektroonilised) ja mõõtesüsteemid on mõõtmiste tegemise vahendid. Põhielemendiks on antud sõidukitüübi tootja mõõtude tabelid või mõõtelehed.
Veoautode diagnostika (raami mõõtmine)
Veoauto geomeetria diagnostikasüsteemid TruckCam, Celette ja Blackhawk on praktikas laialdaselt kasutusel veoauto tugiraamide rikete (nihke) diagnoosimiseks.
1. TruckCami süsteem (põhiversioon).
Süsteem on mõeldud veokite rataste geomeetria mõõtmiseks ja reguleerimiseks. Siiski on võimalik mõõta ka sõiduki raami pöörlemist ja kaldenurka sõiduki tootja määratud võrdlusväärtuste suhtes, aga ka kogu varba sisse-, ratta- ja roolitelje kallet. See koosneb saatjaga kaamerast (monteeritud rattakettadesse, kasutades kolme käega seadmeid, millel on korratav tsentreerimine), vastava programmiga arvutijaamast, edastavast raadioseadmest ja spetsiaalsetest enesekesksetest peegeldavatest sihtmärgihoidjatest. auto raami külge kinnitatud.

TruckCami mõõtesüsteemi komponendid

Isekeskne seadmevaade
Kui saatja infrapunakiir tabab isekeskse hoidiku otsas asuvat fokuseeritud peegeldavat sihtmärki, peegeldub see tagasi kaamera objektiivile. Selle tulemusel kuvatakse sihtmärgi pilt mustal taustal. Kujutist analüüsib kaamera mikroprotsessor ja see saadab teabe arvutisse, mis viib lõpule arvutuse kolme nurga alfa, beeta, läbipaindenurga ja sihtmärgi kauguse põhjal.
Mõõtmisprotseduur:
- isekeskne peegeldav sihtmärgihoidik, mis on kinnitatud sõiduki raami külge (sõiduki raami taga)
- programm tuvastab sõidukitüübi ja sisestab sõiduki raami väärtused (esiraami laius, tagaraami laius, enesekeskse helkurplaadi hoidja pikkus)
- kolme hoovaga klambri abil, millel on korduv tsentreerimise võimalus, on kaamerad paigaldatud sõiduki velgedele
- loetakse sihtandmeid
- enesetsentreeruvad helkurihoidjad liiguvad sõiduki raami keskele
- loetakse sihtandmeid
- enesekesksed helkurihoidikud liiguvad sõiduki raami esiosa suunas
- loetakse sihtandmeid
- programm genereerib joonise, mis näitab raami kõrvalekaldeid võrdlusväärtustest millimeetrites (tolerants 5 mm)
Selle süsteemi puuduseks on see, et süsteemi põhiversioon ei hinda pidevalt kõrvalekaldeid võrdlusväärtustest ja seega ei tea töötaja remondi ajal, millise nihke väärtusega millimeetrites on raami mõõtmeid reguleeritud. Pärast raami venitamist tuleb suurust korrata. Seega on mõnede arvates see konkreetne süsteem sobivam rataste geomeetria reguleerimiseks ja vähem sobiv veoautoraamide parandamiseks.
2. Celette süsteem firmalt Blackhawk
Celette ja Blackhawk süsteemid töötavad põhimõttel, mis on väga sarnane eespool kirjeldatud TruckCami süsteemiga.
Celette'i Bette süsteemis on kaamera asemel laserkiire saatja ning millimeetriskaalaga sihtmärgid, mis näitavad raami nihkumist võrdlusest, on paigaldatud peegeldavate sihtmärkide asemel enesekesksetele sulgudele. Selle mõõtmismeetodi kasutamise eelis raami läbipainde diagnoosimisel on see, et töötaja näeb remondi ajal, millise väärtusega on mõõtmed reguleeritud.
Blackhawki süsteemis mõõdab spetsiaalne laservälgimisseade šassii alusasendit tagarataste asendi suhtes raami suhtes. Kui see ei sobi, peate selle installima. Saate määrata parema ja vasaku ratta nihe raami suhtes, mis võimaldab täpselt määrata telje nihet ja selle rataste läbipaindeid. Kui jäigal teljel muutuvad rataste läbipainded või läbipainded, tuleb mõned osad välja vahetada. Kui teljeväärtused ja rattaasendid on õiged, on need vaikeväärtused, mille alusel saab kontrollida raami deformatsiooni. See võib olla kolme tüüpi: deformatsioon kruvil, raami talade nihkumine pikisuunas ja raami läbipainded horisontaalsel või vertikaalsel tasapinnal. Diagnostika sihtväärtused logitakse ja märgitakse kõrvalekalded õigetest väärtustest. Nende sõnul määratakse kindlaks kompensatsiooniprotseduur ja disain, mille abil parandatakse deformatsioone. See remondi ettevalmistamine võtab tavaliselt terve päeva.

Blackhawki sihtmärk

Laserkiire saatjad
Autodiagnostika
XNUMXD raam / kere suurus
XNUMXD raami / kere mõõtmisega saab mõõta ainult pikkust, laiust ja sümmeetriat. Ei sobi keha välismõõtmete mõõtmiseks.
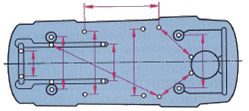
Põrandaraam mõõtmisjuhtimispunktidega XNUMXD mõõtmiseks
Punktiandur
Seda saab kasutada pikkuse, laiuse ja diagonaalmõõtmete määramiseks. Kui diagonaali mõõtmisel paremast esitelje vedrustusest vasaku tagasillani leitakse mõõtmete kõrvalekalle, võib see viidata põrandaraami viltu.
Tsentreeriv agent
Tavaliselt koosneb see kolmest mõõtevardast, mis asetatakse põrandaraami kindlatesse mõõtepunktidesse. Mõõtevardadel on sihtimispoldid, mille kaudu saab sihtida. Tugiraamid ja põrandaraamid sobivad juhul, kui sihtimispoldid katavad sihtimisel kogu konstruktsiooni pikkuse.
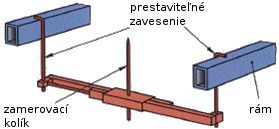
Tsentreeriv agent
Tsentreerimisseadme kasutamine
XNUMXD keha mõõtmine
Kehapunktide kolmemõõtmelisi mõõtmisi kasutades saab neid määrata (mõõta) piki-, põik- ja vertikaalteljel. Sobib täpseks keha mõõtmiseks
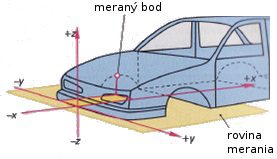
XNUMXD mõõtmise põhimõte
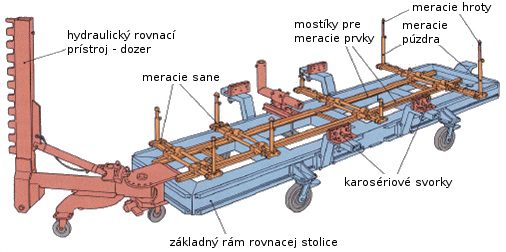
Sirgenduslaud universaalse mõõtesüsteemiga
Sellisel juhul kinnitatakse kahjustatud sõiduk kereklambritega tasanduslaua külge. Tulevikus paigaldatakse sõiduki alla mõõtesild, samas tuleb valida kolm vigastamata kere mõõtmispunkti, millest kaks on paralleelsed sõiduki pikiteljega. Kolmas mõõtepunkt peaks asuma võimalikult kaugel. Mõõtesõiduk asetatakse mõõtesillale, mida saab täpselt reguleerida üksikute mõõtepunktide järgi ning määrata piki- ja põikimõõtmeid. Iga mõõtmisvärav on varustatud teleskoopkorpustega, millel on skaala, millele on paigaldatud mõõteotsad. Mõõtenippe pikendades liigub liugur keha mõõdetud punktidesse, nii et kõrguse mõõtmeid saab täpselt määrata.
Sirgenduslaud mehaanilise mõõtesüsteemiga
Optiline mõõtesüsteem
Valguskiirtega kere optiliste mõõtmiste jaoks peab mõõtesüsteem asuma väljaspool tasanduslaua alusraami. Mõõtmist saab teha ka ilma nivelleerimisaluse tugiraamita, kui sõiduk on püsti või kui see on tungrauaga üles tõstetud. Mõõtmiseks kasutatakse kahte mõõtevarrast, mis asuvad sõiduki ümber täisnurga all. Need sisaldavad laserseadet, kiirte jagajat ja mitmeid prismaatilisi seadmeid. Laserseade tekitab kiirguskiire, mis liigub paralleelselt ja muutub nähtavaks alles siis, kui nad takistusega kokku põrkavad. Kiire jagaja suunab laserkiire lühikese mõõtepiirde suhtes risti ja võimaldab samal ajal sirgjooneliselt liikuda. Prismaplokid suunavad laserkiire sõiduki põranda alla risti.
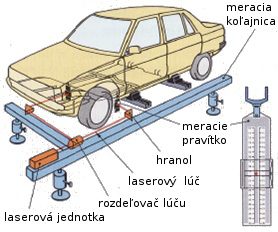
Optiline mõõtesüsteem
Vähemalt kolm kahjustamata mõõtmispunkti korpusel tuleb riputada läbipaistvate plastikust joonlaudadega ja reguleerida vastavalt mõõtmislehele vastavalt vastavatele ühenduselementidele. Pärast laserseadme sisselülitamist muutub mõõtepiirete asukoht seni, kuni valgusvihk tabab mõõtejooniste määratud ala, mille saab ära tunda mõõtejoonistel oleva punase täpi järgi. See tagab laserkiire paralleelsuse sõiduki põrandaga. Kere täiendavate kõrgusmõõtmete määramiseks on vaja paigutada täiendavad mõõtmisjoonised sõiduki alakülje erinevatesse mõõtepunktidesse. Seega on prismaatilisi elemente liigutades võimalik mõõta mõõteriistade kõrguse mõõtmeid ja pikkuste mõõtmeid rööbastel. Seejärel võrreldakse neid mõõtmislehega.
Elektrooniline mõõtesüsteem
Selles mõõtesüsteemis valitakse kehale sobivad mõõtepunktid mõõtehoova abil, mis liigub juhthooval (või vardal) ja millel on sobiv mõõteots. Mõõtmispunktide täpse asukoha arvutab mõõtevarras olev arvuti ja mõõdetud väärtused edastatakse raadio teel mõõtmisarvutisse. Seda tüüpi seadmete üks peamisi tootjaid on Celette, selle kolmemõõtmelist mõõtesüsteemi nimetatakse NAJA 3.

Telemeetria elektrooniline mõõtesüsteem, mida juhib Celette NAJA arvuti, sõidukite kontrollimiseks
Mõõtmisprotseduur: Sõiduk asetatakse tõsteseadmele ja tõstetakse üles nii, et selle rattad ei puudutaks maad. Sõiduki põhiasendi määramiseks valib sond esmalt kolm vigastamata punkti kehal ja seejärel rakendatakse sond mõõtmispunktidele. Seejärel võrreldakse mõõdetud väärtusi mõõtmisarvutisse salvestatud väärtustega. Mõõtmete kõrvalekalde hindamisel järgneb veateade või automaatne sisestus (kirje) mõõtmisprotokolli. Süsteemi saab kasutada ka sõidukite remondiks (pukseerimiseks), et pidevalt hinnata punkti positsiooni x, y, z suunas, samuti kereraami osade kokkupanekul.
Universaalsete mõõtesüsteemide omadused:
- sõltuvalt mõõtesüsteemist on olemas spetsiaalne mõõtmisleht, millel on iga margi ja sõidukitüübi jaoks kindlad mõõtepunktid,
- mõõteotsad on vahetatavad, sõltuvalt nõutavast kujust,
- kehapunkte saab mõõta seadme paigaldamisel või demonteerimisel,
- liimitud autoaknaid (isegi pragunenud) ei tohi enne kere mõõtmist eemaldada, kuna need neelavad kuni 30% kere keerdumisjõust,
- mõõtesüsteemid ei talu sõiduki kaalu ega suuda hinnata jõudu selja deformatsiooni ajal,
- laserkiiri kasutavates mõõtesüsteemides vältige kokkupuudet laserkiirega,
- universaalsed mõõtesüsteemid töötavad arvutiseadmetena koos oma diagnostikatarkvaraga.
Mootorrataste diagnostika
Mootorratta raami mõõtmete tegelikul kontrollimisel kasutatakse Scheibner Messtechniku max -süsteemi, mis hindab optiliste seadmete abil koostöös mootorrattaraami üksikute punktide õige asukoha arvutamise programmiga.

Scheibneri diagnostikaseadmed
Raami / kere remont
Veoauto raami remont
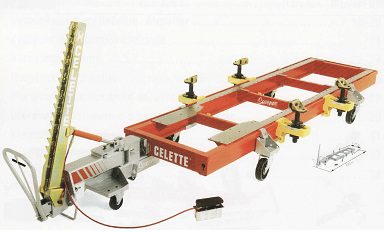
Praegu on remondipraktikas kasutusel Prantsuse firma Celette BPL raami sirgendamise süsteemid ja Ameerika firma Blackhawk Power puur. Need süsteemid on mõeldud igat tüüpi deformatsioonide võrdsustamiseks, samas kui juhtmete ehitamine ei nõua raamide täielikku eemaldamist. Eeliseks on pukseerimistornide mobiilne paigaldamine teatud tüüpi sõidukitele. Raami mõõtmete reguleerimiseks (tõuke/tõmbe) kasutatakse otsehüdraulilisi mootoreid, mille tõuke-/tõmbejõud on üle 20 tonni. Nii on võimalik raamid joondada peaaegu 1 meetrise nihkega. Autoraami remont, kasutades deformeerunud osade kuumust, ei ole sõltuvalt tootja juhistest soovitatav või keelatud.
Sirgendussüsteem BPL (Celette)
Nivelleerimissüsteemi põhielement on betoonist teraskonstruktsioon, mis on kinnitatud ankrutega.
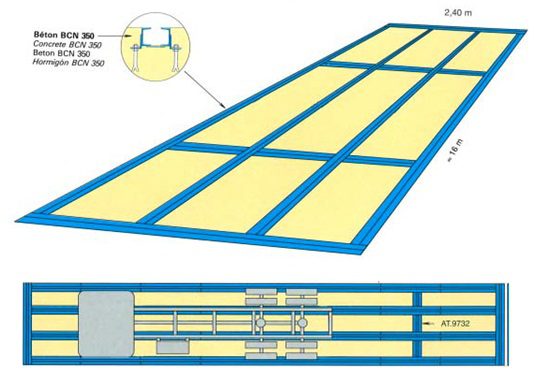
Vaade BPL tasandusplatvormile
Massiivsed terasest redelid (tornid) võimaldavad raame kuumutamata lükata ja tõmmata, need on liigutatavalt paigaldatud ratastele, mis ulatuvad välja, kui käsitõmbehoob liigub, tõsta latti ja seda saab liigutada. Pärast kangi vabastamist sisestatakse rattad risti (torni) konstruktsiooni ja kogu selle pind toetub põrandale, kus see kinnitatakse betoonkonstruktsiooni külge teraskiiludega kinnitusseadmete abil.

Läbige vundamendikonstruktsiooni külge kinnitamise näitega
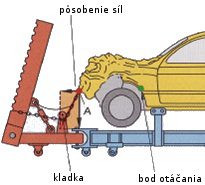
Alati ei ole aga võimalik autoraami sirgendada ilma seda eemaldamata. See juhtub sõltuvalt sellest, millisel hetkel on vaja raami vastavalt toetada. mis punkti suruda. Raami sirgendamisel (näide allpool) on vaja kasutada vaheraami, mis sobib kahe raamitala vahele.

Raami tagaosa kahjustused

Raami remont pärast osade lahtivõtmist
Pärast tasandamist ilmnevad materjali vastupidise deformatsiooni tagajärjel raamprofiilide kohalikud üleulatuvad osad, mida saab eemaldada hüdraulilise rakise abil.
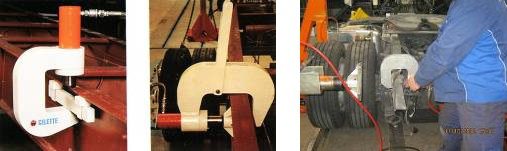
Raami kohalike deformatsioonide korrigeerimine
Kabiinide redigeerimine Celette süsteemidega
Kui on vaja veoautode kabiinid joondada, saab seda toimingut teha järgmiselt:
- eespool kirjeldatud süsteem, kasutades pukseerimisseadmeid (läbib) 3–4 meetrit ilma demonteerimiseta,

Illustratsioon kõrge torni kasutamise kohta kajutite tasandamiseks
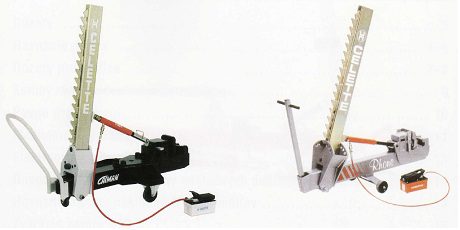
- spetsiaalse alalduspingi Celette Menyr 3 abil, millel on kaks neljameetrist torni (maapinnast sõltumatu); torne saab eemaldada ja kasutada bussi katuste vedamiseks ka maapinnal,

Spetsiaalne lamamistool kajutitele
Tugevuspuuri sirgendussüsteem (Blackhawk)
Seade erineb Celette nivelleerimissüsteemist eelkõige selle poolest, et tugiraam koosneb massiivsetest taladest, mille pikkus on 18 meetrit, millele ehitatakse alla kukkunud sõiduk. Seade sobib pikkade sõidukite, poolhaagiste, kombainide, busside, kraanade ja muude mehhanismide jaoks.
Tõmbamis- ja survejõu 20 tonni või rohkem tasakaalustamise ajal tagavad hüdropumbad. Blackhawkil on mitu erinevat tõuke- ja tõmbetarvikut. Seadme torne saab liigutada pikisuunas ja paigaldada neile hüdrosilindrid. Nende tõmbejõudu kannavad edasi võimsad sirgendusahelad. Remondiprotsess nõuab palju kogemusi ja teadmisi pingete ja pingete kohta. Soojuskompensatsiooni ei kasutata kunagi, kuna see võib häirida materjali struktuuri. Selle seadme tootja keelab selle selgesõnaliselt. Deformeerunud raamide parandamine ilma auto üksikute osade ja selle seadme osade demonteerimiseta võtab aega umbes kolm päeva. Lihtsamatel juhtudel saab selle lõpetada lühema aja jooksul. Vajadusel kasutage rihmarattaid, mis suurendavad tõmbetugevust või survetugevust 40 tonnini. Kõik väikesed horisontaalsed ebavõrdsused tuleks parandada samamoodi nagu Celette BPL süsteemis.

Jaam Rovnation Blackhawk
Selles redigeerimisjaamas saate redigeerida ka näiteks struktuuride struktuure.

Bussi pealisehituse sirgendamine
Kuumutatud deformeerunud osadega veoauto raamide remont - raamiosade vahetus
Volitatud teeninduse tingimustes kasutatakse deformeerunud kuumutatud osade kasutamist sõiduki raamide joondamisel sõidukite tootjate soovituste põhjal ainult väga piiratud ulatuses. Sellise kuumutamise korral kasutatakse eelkõige induktsioonkuumutust. Selle meetodi eelis leegi kuumutamise ees on see, et pinna kuumutamise asemel on võimalik kahjustatud piirkonda suunatult soojendada. Selle meetodi korral ei teki elektripaigaldise ja plastist õhkjuhtmete kahjustusi ega demonteerimist. Siiski on oht materjali struktuuri muutmiseks, nimelt tera jämedamaks muutumiseks, eriti ebakorrektse kuumutamise tõttu mehaanilise vea korral.

Induktsioonkuumutusseade Alesco 3000 (võimsus 12 kW)
Raami osade vahetamine toimub sageli vastavalt "garaažiteenuste" tingimustes. autoraamide remondil, teostatakse iseseisvalt. See hõlmab deformeerunud raami osade asendamist (nende väljalõikamist) ja asendamist raamiosadega, mis on võetud teiselt kahjustamata sõidukilt. Selle remondi ajal tuleb hoolikalt raamiosa paigaldada ja keevitada originaalraami külge.
Sõiduautode raamide remont
Autoõnnetusele järgnenud kere remont põhineb sõiduki peamiste osade (nt teljed, mootor, uksehinged jne) üksikutel kinnituskohtadel. Üksikud mõõtmistasandid määrab kindlaks tootja ja remondiprotseduurid on täpsustatud ka sõiduki remondi käsiraamatus. Remondi enda käigus kasutatakse töökodade põrandasse sisseehitatud remondiraamide või väljaheidete sirgendamiseks erinevaid konstruktsioonilahendusi.
Liiklusõnnetuse ajal muudab keha palju energiat vastavalt raami deformatsiooniks. keha lehed. Kere tasandamisel on vaja piisavalt suuri tõmbe- ja survejõude, mida rakendavad hüdraulilised tõmbe- ja surveseadmed. Põhimõte on see, et selja deformatsioonijõud peab olema deformatsioonijõu suunale vastupidine.
Hüdraulilised tasandusseadmed
Need koosnevad pressist ja otsesest hüdromootorist, mis on ühendatud kõrgsurvevoolikuga. Kõrgsurvega silindri puhul ulatub kolvivars kõrgsurve mõjul välja, pikendussilindri puhul tõmbub tagasi. Silindri ja kolvivarda otsad peavad olema kokkusurumise ajal toestatud ning paisumise ajal tuleb kasutada paisumisklambreid.

Hüdraulilised tasandusseadmed
Hüdrauliline tõstuk (buldooser)
See koosneb horisontaalsest talast ja selle otsa paigaldatud sambast koos pöörlemisvõimalusega, mida mööda survesilinder saab liikuda. Nivelleerimisseadet saab kasutada tasanduslaudadest sõltumatult keha väikeste ja keskmiste kahjustuste korral, mis ei nõua väga suurt veojõudu. Kere tuleb kinnitada tootja poolt ettenähtud kohtadesse, kasutades šassii klambreid ja horisontaalse tala tugitorusid.
Erinevat tüüpi hüdraulilised pikendused (buldooserid);
Sirgenduslaud hüdraulilise sirgendusseadmega
Sirgendav tool koosneb tugevast raamist, mis neelab sirgendusjõud. Autod kinnitatakse selle külge lävepalgi alumise serva abil klambrite (klambrite) abil. Hüdraulilise nivelleerimisseadme saab hõlpsasti paigaldada kõikjale tasanduslauale.
Sirgenduslaud hüdraulilise sirgendusseadmega
Raskeid kehakahjustusi saab parandada ka nivelleerimispinkidega. Sel viisil tehtud parandusi on lihtsam teostada kui hüdraulilise pikenduse kasutamist, kuna keha vastupidine deformatsioon võib toimuda keha esialgsele deformatsioonile otse vastupidises suunas. Lisaks saate kasutada vektoripõhimõttel põhinevaid hüdraulilisi nivelle. Seda mõistet võib mõista kui seadet sirgendamiseks, mis võib venitada või suruda kokku deformeerunud kehaosa mis tahes ruumilises suunas.
Pöörddeformatsioonijõu suuna muutmine
Kui õnnetuse tagajärjel tekib lisaks kere horisontaalsele deformatsioonile ka deformatsiooni piki selle vertikaaltelge, tuleb keha rulliga sirgendusseadmega tagasi tõmmata. Tõmbetugevus mõjub siis algsele deformatsioonijõule otse vastupidises suunas.
Pöörddeformatsioonijõu suuna muutmine
Soovitused keha parandamiseks (sirgendamiseks)
- keha sirgendamine peab toimuma enne mitteparandatavate kehaosade eraldamist,
- kui sirgendamine on võimalik, viiakse see läbi külmalt,
- kui külma tõmbamine on võimatu ilma materjali pragude tekkimiseta, saab deformeerunud osa kuumutada suurel alal, kasutades sobivat isetekkelist põletit; materjali temperatuur ei tohiks aga struktuurimuutuste tõttu ületada 700 ° (tumepunane),
- pärast iga sidumist on vaja mõõtepunktide asukohta kontrollida,
- et saavutada täpsed keha mõõtmised ilma pingeteta, tuleb konstruktsiooni venitada veidi rohkem, kui on vajalik elastsuse tagamiseks,
- pragunenud või purunenud kandvad osad tuleb ohutuse tagamiseks välja vahetada,
- tõmbeahelad tuleb kinnitada nööriga.
Mootorratta raami remont

Joonis 3.31, Vaade mootorratta riietusjaamale
Artiklis antakse ülevaade raamkonstruktsioonidest, kahjustuste diagnostikast, samuti maanteesõidukite raamide ja kandekonstruktsioonide parandamise kaasaegsetest meetoditest. See annab kahjustatud sõidukite omanikele võimaluse neid taaskasutada, ilma et peaksite neid uutega asendama, mis toob sageli kaasa märkimisväärse rahalise kokkuhoiu. Seega on kahjustatud raamide ja pealisehitiste parandamisel lisaks majanduslikule ka keskkonnaalane kasu.

